解説– tag –
-
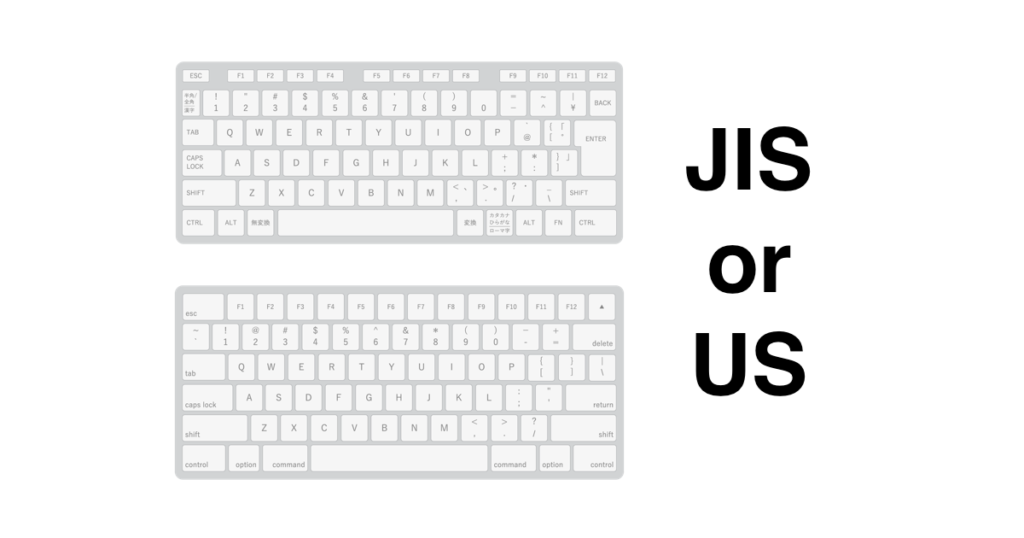
日本語配列と英語配列、どっちにすべきかエンジニアが解説
キーボード購入時に選択を迫られるキー配列。「日本語配列にすべきか…英語配列にすべきか…」と悩んでいませんか? ここではどちらの配列を選択すべきか、エンジニア目線で解説してみたいと思います。 結論:慣れている配列にすべし 慣れてしまったHHKBのUS... -

【Swift】ScenePhaseの基本的な使い方をエンジニアが解説
アプリの状態がフォアグラウンドかバックグラウンドか検知したい場面で活躍するのが、「ScenePhase」です。 たとえば、「バックグラウンドに遷移した場合は処理を中断させ、フォアグラウンドに戻ってきたときに処理を再開させる」といった処理を組みたい時... -
現役エンジニアがエンジニアとして必要なスキルをまとめてみた
ここではエンジニア・プログラマーになりたいと思っている方に、ぜひ身につけて欲しいスキルについて、現役エンジニアとして14年目を迎えた筆者がまとめました。 ここで紹介するスキルは必須、または身につけておいた方が有利というものなので、ぜひ参考に... -
【Swift】Timerの基本的な使い方をエンジニアが解説
一定時間後に1度だけ処理を実行したいときや、定期的に何かしらの処理を実行したい場合に活躍するTimer。ここではSwiftが提供しているTimerクラスの基本的な使い方について解説します。 Timerを使うことができれば、状態の監視であったり、一定時間後に通... -
【Swift】NWConnectionの基本的な使い方をエンジニアが解説
Swiftには便利なフレームワークがたくさん用意されています。ここではネットワークフレームワークの1つである「NWConnection」の基本的な使い方について解説します。 「NWConnection」を使うことができれば、簡単にTCPやUDPといったプロトコルでネットワー... -
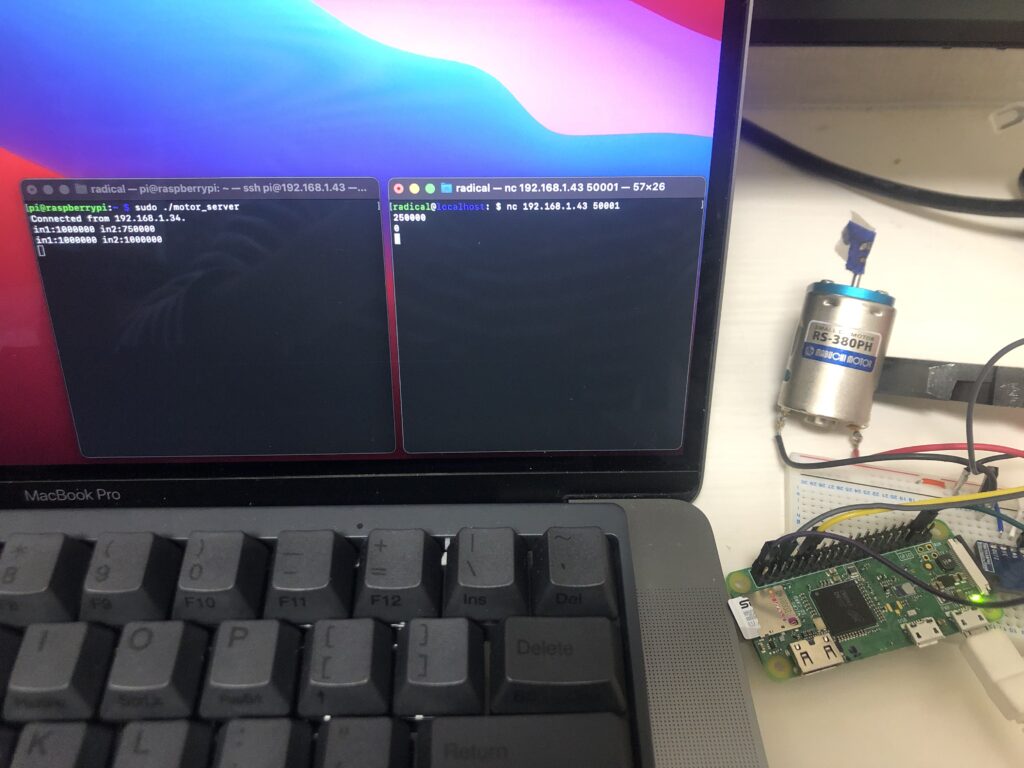
【Raspberry Pi】モーター制御するサーバープログラムの作り方
前回でRaspberry PiのPWM機能とモータードライバーICを使って、モーターの回転数と回転方向を制御できるようになりました。しかし、レゴの車に載せるモーターとして、まだ足りない機能があります。 それはサーバー機能です。今はラズパイのターミナルに対... -

WSLのバージョン確認・変更方法を現役エンジニアが解説
WSLを使っていると、「あれ?このディストリビューションのWSLバージョン何にしたっけ?」となって焦ることありませんか? そんなときのために、ここではディストリビューションのWSLバージョンの確認方法を解説します。サクッとコマンドを入力するだけな... -
【Raspberry Pi】モータードライバーを制御して、モーターの回転方向を変える方法
前回でRaspberry PiのPWM機能を使ってモーターの回転数を制御できるようになりました。しかし、レゴの車に載せるモーターとして、まだ足りない機能があります。 それは逆回転です。やはり前進だけでなくバックもできないと不便ですからね。 というわけで今... -
【Raspberry Pi】PWMでモーター回転数を制御する方法
前回の記事でモーター駆動回路を作成し、ラズパイのGPIOでモーターの回転をON/OFFすることができました。しかし、このままでは「0回転」or「フル回転」という極端な使い方しかできません。 というわけで次はモーターの回転数を制御したいわけですが、そん... -

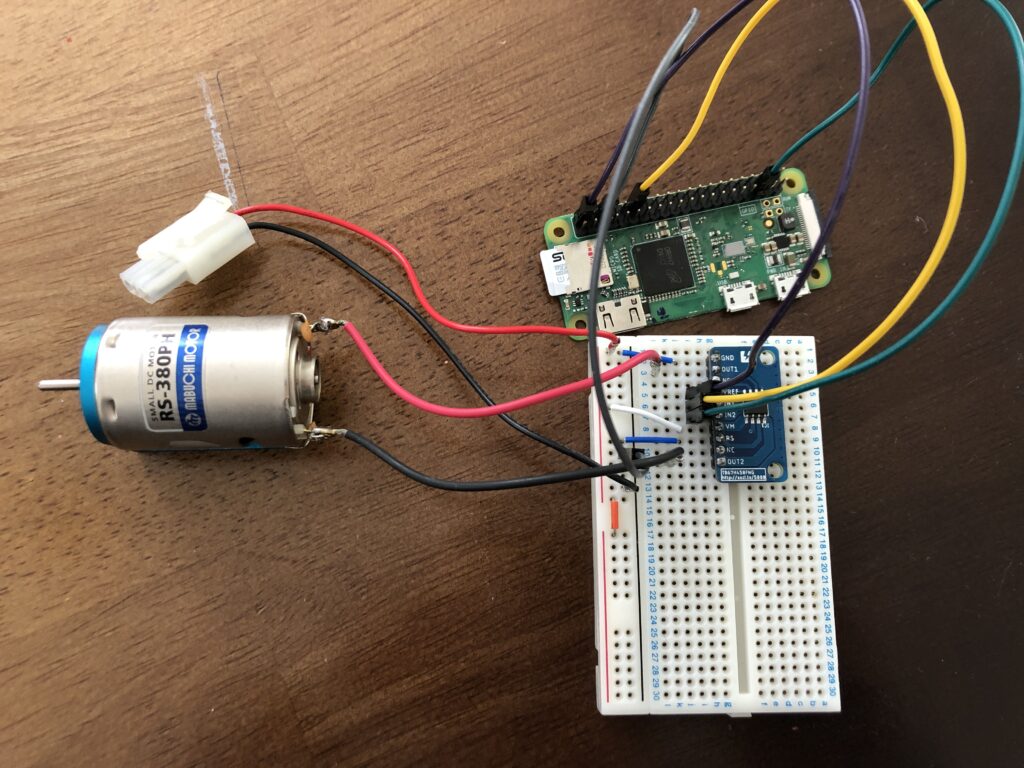
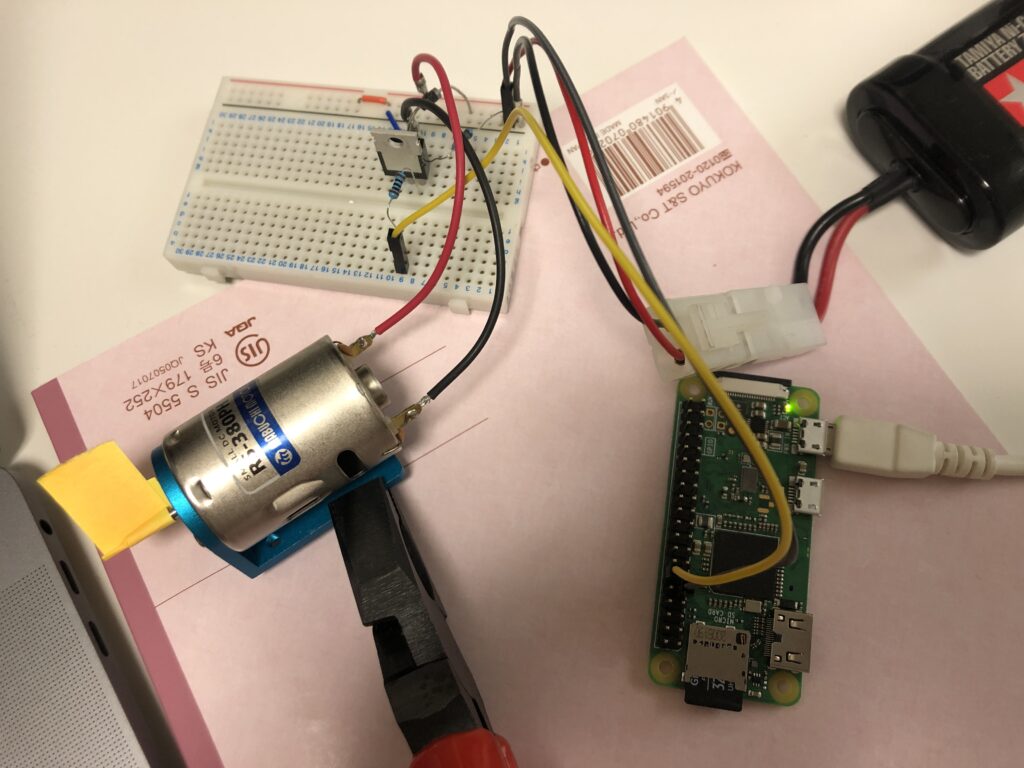
【Raspberry Pi】モーターを制御する方法
ラズパイを使えばさまざまな物を制御することができます。ここでは制御するものとして代表的なモーターの制御方法について解説します。 またこの記事を始まりとして、今後モーター制御を応用して、スマホ操作でレゴの車を走らせるところまで解説していきま...